
Denizcilik alanında dünya genelinde “Dinamik Konumlandırma Sistemi” başta olmak üzere yanaşma manevralarını kolaylaştıran teknolojik gelişmelerin kılavuzluk mesleğinin geleceğini ne şekilde değiştirebileceği açısından şimdiden irdelenmesinde fayda vardır.
Bu teknolojilere ek olarak “ Yapay Zeka ‘ olgusunun endüstrinin neredeyse her alanında hızla devreye giriyor olması da üstünde önemle durmamız gereken bir diğer noktadır.
Bu mevcut teknolojilere ana başlıklar halinde kısaca göz atalım :
A. Dinamik Konumlandırma Sistemi :
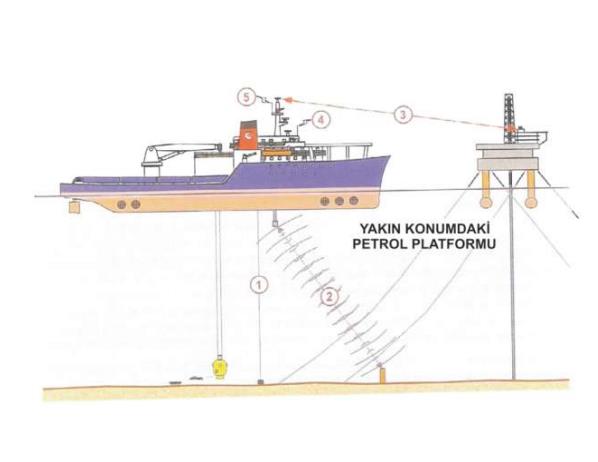
Açık deniz platformlarında kullanılan hizmet gemileri yerine getirdikleri özel görevler için çok hassas pozisyon (konum) bilgisine gereksinim duyarlar. Dalış destek gemileri tekne bünyesinden açılan bir bölümden dalgıçlarını suya indirirler. Dalgıçların kullandıkları hava boruları çanın içinden geçerek dalgıçlara ulaşır ve bir anlamda onları çana bağlar. Bu noktada destek gemisi çanın pozisyonunda bir metreden fazla bir değişiklik olmayacak şekilde pozisyonunu büyük bir hassasiyetle mümkün olduğunca sabit tutmak zorundadır. Konvansiyonel olarak “Demir Elleçleyen Romorkörler”(Anchor handling tugs) hizmet gemilerinin baş ve kıç omuzluklarından dört demiri gereken şekilde konumlandırır ve ardından hizmet gemisi demirlerin boşunu alarak mevkisini sabitlemiş olur. Ancak bu oldukça zaman alan bir süreç olduğu gibi özellikle petrol platformuna yakın konumlarda hava ve deniz durumu sertleştiğinde büyük riskler içerir. Bu durumda hizmet gemisinin demirlerini neta etmek çok zaman alabileceği gibi demirler petrol platformunun su altında kalan kesimlerine hasar verebilir. Dört demir bağlama sisteminde hizmet gemilerinin karşılaştığı tehlikeli sorunlar zamanla bu alanda yeni ve daha pratik bir sistemin devreye girmesini gerekli kılmıştır. “Dinamik Konumlandırma Sistemi” ( Dynamic Positioning System ) ya da kısaca DK sistemi ilk olarak demir atmanın mümkün olmadığı derinliklerde petrol kuyusu açan sondaj gemilerinde kullanılmaya başlandı. Ancak özellikle 1990’lı yıllarla beraber bilgisayar teknolojisindeki hızlı ilerlemeler bu sistemi daha da mükemmel hale getirerek çeşitli hizmet gemilerinde ve özellikle uzaktan kumandalı denizaltı (Remotely controlled underwater vehicles-ROV) taşıyan dalış destek gemilerinde de yaygın kullanım alanı bulmasını beraberinde getirdi.
DK sistemi bu gemilerin yanı sıra belli bir hat boyunca deniz dibine kablo ve elektrik döşeyen gemilerde de kullanılmaktadır. DK sisteminin farklı uygulamaları zamanla bir araya getirilerek kullanım amacına bağlı olarak on farklı operasyon modunda kullanılabilen sofistike bir manevra yardımcısı geliştirilmiştir.
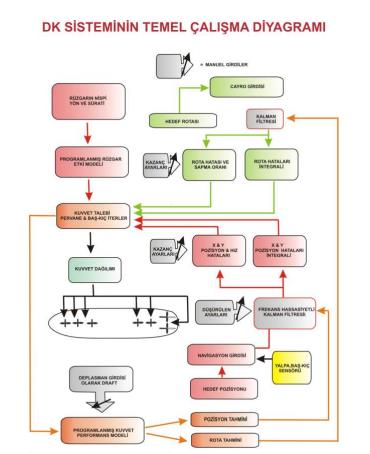
Şekil -1 DK Sisteminin çalışma şeması
DK sistemi genel bir tanımlamayla gemiyi verilen bir mevkiye yönlendiren,ya da bir mevkii üzerinde sabit kalmasını sağlayan merkezi bir bilgisayar sistemidir. DK sistemi bu görevi gerçekleştirirken sadece bir kaynaktan değil,birçok kaynaktan her an mevkii bilgisi alır ve aldığı bu bilgileri rüzgar,akıntı vs.gibi çevresel faktörleri de hesaba katarak geminin ana makinesi ve çok sayıdaki baş ve kıç iterlerini istenilen manevrayı gerçekleştirmek üzere harekete geçirir. Tüm bu bilgilerin sistem içinde işlenmesi ve gerek duyulan hareketin manevra araçlarına iletilmesi hemen her saniye otomatik olarak gerçekleştirilen oldukça karışık matematik hesaplar sayesinde gerçekleşir. DK sistemi ve köprüstünde kullandığımız bir seyir yardımcısı olan otopilot’un çalışma prensipleri temelde birbirine benzer.
Çabuk Adaptasyon Kontrolü : DK sistemine 2001 senesinde uyarlanan diğer bir yenilik ise”Çabuk Adaptasyon Kontrolü” olarak dilimize çevirebileceğimiz “Fast Learn Command” fonksiyonudur.Normalde DK sisteminin kullanmakta olduğu pozisyon hatası integral hesabının çevresel etkiyi gerçek anlamda algılayıp geminin pozisyonunu hassas bir şekilde koruyabilmesi için bir geçiş evresine gerek vardır ki bu süre ( settling period ) genelde on yirmi dakika arası sürebilir. Bu geçiş sürecindeki zafiyeti önlemek amacıyla belli bir süre için pozisyon hatalarını amplife ederek integral hesabına dahil eden çabuk adaptasyon komutu bu nedenle sisteme dahil edilmiştir.2001 senesinden önce imal edilen DK sistemlerinde bu fonksiyon olmayabilir.
Kalman Filtresi : DK sistemi anlatıldığı üzere hassas navigasyon sensörlerine ihtiyaç duyar.Ancak bu verilerde meydana gelecek kısa süreli tutarsız bilgi akışı ( white noise ) sistem tarafından filtrelenerek yumuşatılır. Kalman filtresi olarak adlandırılan bu karmaşık matematiksel sistem ilk olarak NASA tarafından yörüngedeki uyduların rotasını hassas olarak belirlemek için kullanılmıştır. Özet olarak sistem bir sonraki pozisyonu navigasyon verilerinden bağımsız olarak geminin kullandığı itme gücüne bağlı olarak hesaplar. Navigasyon sensörlerinden gelen pozisyon bilgileri yüksek doğruluk oranı içerdiğinde dar ve uzun bir grafik oluşturur. Pozisyonlar çok hassas değilse grafik alçak ve yayvandır. İçinde bulunulan şartlara göre Kalman fitresi ayarlarıyla oynamak suretiyle pozisyon bilgisi filtrelenir ve bu filtrelenmiş verilere göre gemi makinesi ve baş-kıç iterleri çalıştırılır. Eğer Kalman filtre ayarı yüksek tutulmuş ise bu navigasyon sensörlerinden gelen bilgiye güvenildiği anlamını taşır. Başka bir deyişle filtreleme değeri azdır ve hesaba temel olacak pozisyon bilgisi büyük ölçüde sensörlerden gelen bilgiye dayanır.
Kısaca özetlersek Kalman filtre ayarı yüksek ise az filtreleme,düşük ise yoğun filtreleme vardır. Örneğin ağır denizlere maruz kalmakta olan bir gemi Kalman filtre ayarını düşük tutarak yoğun filtreleme yapar. Aksi takdirde ağır dalgalarla her an pozisyonu etkilenen gemi makine ve baş-kıç iterlerini son derece reaktif bir şekilde,kapasitelerine aşırı yüklenerek kullanacaktır. Kalman filtresi uygun ayarla kullanılarak sistemin aşırı yük altında çalışarak arıza yapma riski bertaraf edilmiş olur
Pozisyon Sensörleri ( PME-Position Monitoring Equipment ) :
1.Gerilmiş Tel ( Taut wire ) : Özel bir vinçle devamlı gerili tutulan bir telin ucundaki ağırlık deniz dibine mayna edilir. Vinç üzerindeki donanım telin uzunluğu ve kısalığını sisteme veri olarak aktarmak suretiyle başlangıçta girilen derinlik değerindeki değişimler izlenir.
Şekil -2 DK Sisteminde kullanılan başlıca sensörler
2.Sonar Markası ( Sonar beacon ) : Deniz dibinde konumlandırılan bir sonar markası gemi teknesine bağlı akustik izleyici sensör tarafından izlenerek mesafe ve kerteriz değişimleri kaydedilerek pozisyon bulunur (1500 metreye kadar kullanılır,ancak 500 metreden sonra hassasiyeti azalır.)
3.Artemis : Kısa mesafeli bir radar sistemi olup platform bünyesine monte edilmiş bir alıcı/verici yardımıyla pozisyon saptaması yapar ( 5 deniz miline kadar kullanılır.)
4.Syledis : Gemi üzerindeki bir radyo vericisinin gönderdiği sinyaller yakın çevrede platforma veya karaya konumlandırılmış vericileri harekete geçirir ve geminin pozisyonu bu vericilerden gelen mesafeler yardımıyla bulunur.
5.GPS ( Global Positioning System ) : Gemi GPS alıcısı uydulardan devamlı aldığı sinyaller yardımıyla geminin pozisyonunu saptar.
Gemiye DK Sistemi İle Manevra Yaptırmak :
DK sistemi DK konsoluğu aracılığı ile kullanılır. aşağıdaki şekilde tipik bir DK konsolu görülmektedir. Konsol hareketi yönlendiren joystick, döner top,VDU ünitesi,navigasyon sensör göstergeleri ve diğer kontrol ünitelerinden oluşur. Aynı bilgisayar ortamında olduğu gibi istenilen menülere imleçle gidilir ve alt menüler açılabilir. Ekranda görünen kontrol noktası ( dönüş noktası ) geminin dönüş hareketini yaptığı eksendir ve istenilen konumda baş, kıç, vasat olarak ayarlanabilir. Hareket ekranında ( Motions page ) geminin yapmış olduğu hareket ve diğer taraftaki vektör ekranında ise ( Vector page ) baş-kıç iterler ve gemi pervanesinin nasıl çalışmakta olduğu görülmektedir. Operatörün gemiyi hareket ettirmesi için hedef ( Target ) istenilen süratte geminin hareket etmesini istediği noktaya getirilir. Operatör pruvayı değiştirmek istediğinde bunu rota değiştirme alt menüsünden istenilen değerleri girerek gerçekleştirir.
DK sistemi her ne kadar genelde özel amaçlı gemiler tarafından kullanılmakta ise de sınırlı sayıda bazı yolcu gemilerinde de kullanılmaya başlanmıştır. Sistemin pozisyon koruma ve hedefe yönlendirme görevini normal insan algı ve sezgilerinin başa çıkamayacağı matematik bir hassasiyetle ve hataya yer vermeden gerçekleştirdiği açıktır.
IMPA ( Uluslar arası Kılavuz Kaptanlar Derneği ) 1998 senesinde Shanghai’de yapılan 14.genel kongresinde denizcilik sektöründeki hızlı teknolojik gelişmelerle ilgili olarak 13 Kasım 1998 tarihinde “ Gelişen Denizcilik Teknolojileri” ( Emerging Maritime Technologies ) başlığı altında bir genelge yayınlamıştır.
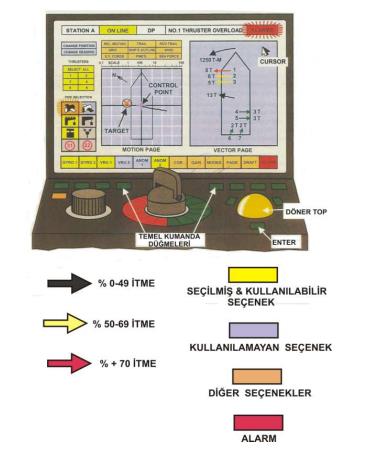
Şekil -3 Standart bir DK konsolu
Bu genelgede kılavuz kaptanların liman ve suyollarında kullanılmak üzere AIS, ECDIS, DGPS, Sessiz VTS ( Silent VTS ) ,Taşınabilir Kılavuz Üniteleri (Pilot Portable Units ) gibi ileri seyir elektronik sistemlerinin geliştirilmeleri ve kullanımlarındaki yardımcı rollerine vurgu yaparak kılavuzluk teşkilatlarına, , seyir güvenliğini daha da arttırmak, can güvenliği, çevreyi ve mülkü korumak amacıyla kılavuz kaptanlarını bu ileri teknolojileri kullanma çabalarına öncü olmak anlamında teşvik etmeleri ve desteklemeleri yönünde tavsiyede bulunmuştur.
DK sistemi genelde yukarıda bahsetmiş olduğumuz özel gemilerde yaygın olarak kullanım alanı bulmaktadır. Ancak her yeni teknolojinin hızla geliştirildiği ve ucuzladığı göz önüne alındığında tüm bu gelişmelerin kılavuz kaptanlık mesleğini yakın gelecekte önemli ölçüde etkileyebileceğini şimdiden söyleyebiliriz.
Kısaca özetlemek gerekirse “Dinamik Konumlandırma Sistemi” pahalı bir teknolojidir ancak burada önemle altı çizilmesi gereken bilgisayar ve makine’nin sektörümüzde de insan algılarının doğruluk derecesi ve hassasiyetini çoktan geride bırakmış olduğu gerçeğidir.
B.Yanaşma Yardımcı Sistemleri :
Kılavuzluk mesleğinin geleceğini belirleyecek diğer önemli bir teknoloji de özellikle tanker ve gaz terminallerinde yaygın kullanım alanı bulan ” Yanaşma Yardımcı Sistemleri ” dir (Docking Aid Systems-DAS) .
Söz konusu sistemin başlıca parametreleri Şekil-4 ‘te görüleceği üzere gibi şu unsurlardan oluşur :
- Lazer Sensörler
- Gösterge Tablosu
- Ana Bilgisayar
- İşlemci
- El Ünitesi
- Yardımcı Sensörler a.Akıntı Sensörü b.Gelgit Sensörü c.Hava Durumu Sensörü
- Manevra Ekranı

Şekil -4 Yanaşma yardımcı sistemleri konfigürasyonu
Bu parametrelere sırasıyla göz atalım:
1.Lazer Sensörler : Lazer sensörleri yanaşmanın yapılacağı rıhtıma en az 25 metre arayla yerleştirilirler. Lazer sensörlerin sayısı ve aralıkları rıhtıma yanaşacak çeşitli gemi boyları dikkate alınarak yanaşacak geminin baş ve kıç noktalarına mutlaka kumanda edecek şekilde düzenlenmelidir.
Lazer sensörler gönderdikleri göze zararlı olmayan klas 1 infra-red enerji ışınlarıyla geminin 300 metreden İtibaren baş-kıç mesafesini ve baş-kıç yaklaşım hızının hesap edilebilmesini sağlarlar.
Lazer sensörler genelde paslanmaz çelik veya aliminyum gövdeden yapılır ve uzayıp kısalabilen teleskopik bir kaidenin üzerine yerleştirilirler.Böylelikle gelgit durumuna göre suyla temas etmelerinin de önüne geçilmiş olur.
Lazer sensörler sıfır noktası olarak usturmaçaların temas edilen dış yüzeyini alır.
 |
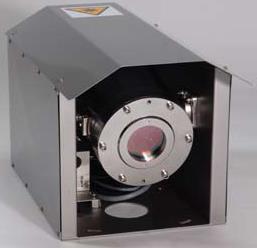 |
Şekil -5 Rıhtım üzerinde konuşlandırılan lazer sensörler
2.Gösterge Paneli ( Display Board ) : Gösterge panelleri lazer sensörlerin gönderdiği ışınların işlemciye gönderilmesiyle hesap edilen baş-kıç mesafesi ve baş-kıç yaklaşım hızlarının yaklaşık 250 metreden Kılavuz Kaptan ve Gemi Kaptanı tarafından gece ve gündüz görülebilmesini sağlayan büyük panellerdir. Genellikle 1-4 metre arasında değişen kaidelerin üzerine oturtulurlar .Gösterge paneli genelde hem dikey hem de yatay olarak +/- 35 derece dönebilir ve böylelikle değişken köprüüstü yükseklik ve gemi boyu değişkenlerine uyum kazandırılmış olur.
Şekil-6 ’da görüleceği üzere panelin üst kısmında 3 dijit olarak baş ve kıç uzaklıkları yan yana verilir ( 0.0-19.9 mt,20-200 mt)
.Panelin altında ise baş ve kıç yaklaşma hızı 2 dijit olarak cm/sn olarak verilir (0-99 cm/sn).
Ayrıca panel üzerinde kırmızı,sarı ve yeşil olmak üzere üç renkli ikaz lambaları mevcuttur.
Kırmızı hızlı bir şekilde belirli bir uzaklık için geçerli maksimum hız parametresinin çok hızlı olarak geçilmekte olduğunu ifade eder.
Sarı yandığında gemi belirlenen ideal hız parametresinin üzerinde bir hızla baş veya kıçtan ya da her taraftan da rıhtıma yaklaşmaktadır.

Şekil-6 Yanaşma yardımcı sistemi gösterge paneli
Eğer yeşil yanıyorsa gemi emniyetli bir şekilde belirlenen hız parametresinin altında emniyetli bir hızla rıhtıma yaklaşmaktadır.
Genellikle rıhtıma bordasal olarak 100-150 metre mesafe kaldığında 24 cm/sn bir bordasal yaklaşma hızı normal kabul edilirken ,yanaşmanın son aşamasında bu parametre 10 cm/sn değerinin altında olmalıdır.
3-4.Ana Bilgisayar ve İşlemci Ünite : Lazer sensörlerden ve diğer yardımcı sensörlerden gelen veriler ( Akıntı,gelgit,rüzgar sensörleri) ana bilgisayar
üzerindeki işlemci üniteden geçerek hız ve uzaklık değerlerini bize verirler.Ana bilgisayar üzerine paralel olarak terminalin diğer bilgisayarları bağlanabilir.Yapımcılar tarafından söz konusu işlemciler tamamen bağımsız ve güç kesintilerinden etkilenmeyecek şekilde tasarlanmıştır.
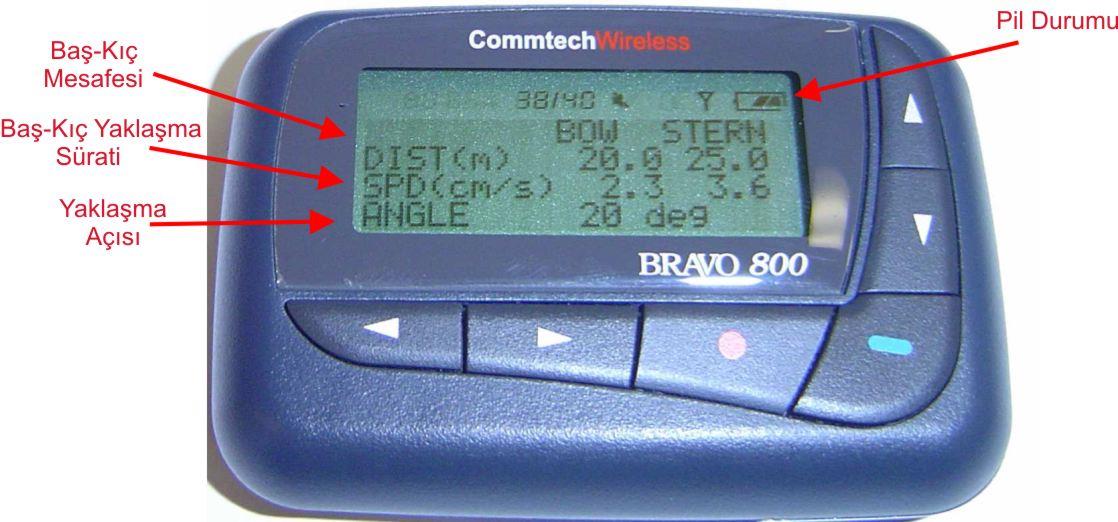
5.El Ünitesi ( Portable Pilot Unit –PPU ) : Pager olarak niteleyebileceğimiz taşınabilir el üniteleri gösterge panelinde yer alan bilgileri kılavuz kaptanın üzerinde taşıyabileceği kadar küçük bir cihaz üzerinde görülebilmesini sağlar.
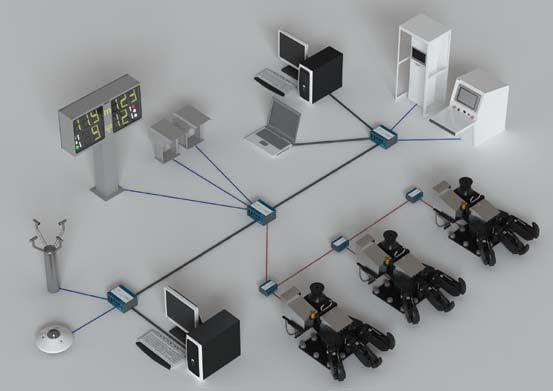
Şekil-7 Sistem çalışma şeması
Anten ve frekans gücüne göre bu cihazlar bilgileri yaklaşık 2-3 km mesafeden almaya başlayabilir. Bilgiler UHF frekansından gönderilir (464-468 Mhz).
Mesafe ve hız bilgileri LCD üzerinde istenirse ekran aydınlatılarak her biri 20 karakter uzunluğunda olabilen dört satır üzerinde Şekil - 8 üzerinde görüleceği şekilde iletilir.
Şekilde en alt satırda görülen açı (angle) değeri ise geminin rıhtım hattına doğru yaptığı açı değeridir.Eğer bu açı pozitif ise geminin baş tarafı rıhtıma kıç tarafından daha yakındır (Bow-in).Açı değeri negatifse geminin kıç tarafı rıhtıma baş tarafından daha yakındır.
Şekil-8 Taşınabilir el ünitesi ( Portable pilot unit )
Şekilde en alt satırda görülen açı (angle) değeri ise geminin rıhtım hattına doğru yaptığı açı değeridir.Eğer bu açı pozitif ise geminin baş tarafı rıhtıma kıç tarafından daha yakındır (Bow-in).Açı değeri negatifse geminin kıç tarafı rıhtıma baş tarafından daha yakındır.
6.Yardımcı Sensörler : Sistemin yardımcı unsurlarından biri olan akıntı sensörü Dopler prensibi ile çalışır ve suya gönderdiği akustik sinyaller sayesinde akıntı hızı,yönü ve su sıcaklığı ölçülür.
Gelgit parametresi lazer sensörler aracılığı ile her türlü kar, yağmur,deniz durumunda saptanabilir.
Sistemdeki hava istasyonu rüzgar hızı ve yönünü,yağış durumunu,barometre değeri,sıcaklık ve nispi nemi ölçmeye yarayan sensörlerle donatılmıştır.Tüm bu bilgiler ana bilgisayara sistem içerisinde anında aktarılır ve ekrandan görülebilir.
7.Manevra Ekranı : Çeşitli yapımcı firmalara göre ekran sunumu olarak ufak tefek farklılıklar içeren programlarla manevranın her safhası kuşbakışı olarak ya da baş kıç uzaklık ve hızlarının grafik görünümü olarak terminalden ve bağlı diğer tüm bilgisayarlar üzerinden her an izlenebilir.
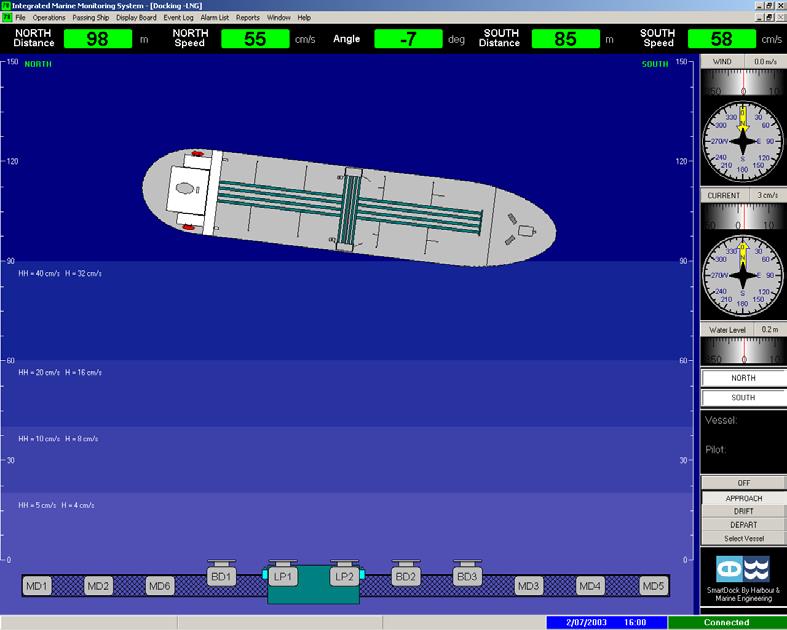
Şekil-9 Kuşbakışı manevra ekranı
Tüm bu bilgiler kayıt altına alınır ve sistemin hafızasında saklanır.
Ekran üzerinde baş-kıç mesafesi, baş-kıç yaklaşma hızı, geminin bordasal transfer izi, geminin durması ve bordasal transfere başlaması gereken noktalar, rüzgar hızı ve yönü,akıntı hızı ve yönü vs.gibi tüm bilgiler istenildiği biçimde görüntülenebilir. Şekil-9’da gösterilen manevra ekranına göz attığımızda tüm bu sözü edilen bilgilere ilave olarak lazer sensörlerinin konumlarının da ekranda gösterilmiş olduğu görülecektir.
Rüzgar ve akıntı yön ve kuvvetleri ise ekranın sol tarafında gösterilmiştir.
Yalnız burada dikkat çekebilecek bir farklılık geminin baş tarafı yakın olduğunda açı değeri genelde pozitif ifade edilirken bu örnekte negatif olarak gösterilmiştir.Geminin kıç tarafının yanaşacağı bölüm North,baş tarafının yanaşacağı bölüm ise South olarak gösterilmiştir.
Sonuç olarak yanaşma yardımcı sistemleri yanaşma manevrasının her anında kritik bilgileri Kılavuz Kaptana ve Gemi Kaptanına iletmek yoluyla insan algılarının yanılma ve yetersiz kalabilme riskini ortadan kaldırarak geminin yanaşma manevrasına son derece olumlu bir katkı yapmaktadır.
Her ne kadar günümüzde hala kılavuz kaptanlar römorkörlere ve gemi makinesine kumanda etmek yoluyla yapılan işin merkezinde ise de “Dinamik Konumlandırma Sistemi”nden sonra ikinci olarak burada aktardığımız “Yanaşma Yardımcı Sistemleri” gibi sistemlerle insan algısının ve bireysel performansın gitgide teknolojinin yanında adeta ikinci bir unsur olarak yer alacağını öngörebiliriz.
Eğer “ Yapay Zeka “ olgusunı da işin içine katar isek şu an çok net olarak kestiremediğimiz ancak çok da uzak olmayan gelecek zaman diliminde belki de 30-40 sene içerisinde özellikle limanlarda verilen kılavuzluk hizmetlerinin tamamen yapay zeka odaklı olarak gerçekleştirilecek olduğunu tahmin edebiliriz..
Ancak bu geçiş muhtemelen kademeli olacaktır .
Biraz futuristik bir yaklaşımla kılavuzluk hizmetlerinin nasıl bir evrim geçireceği hakkındaki tezimi kısaca aşağıda açıklamaya gayret edeceğim:
İlk etapta söz konusu kılavuzluk hizmetleri teknolojinin imkanlarından faydalanarak gemiye çıkmayan ( land-based ) bir kılavuz kaptan ya da operatör tarafından ekran başında yapılacak ve muhtemelen bir süre sonra da gerçek kişinin yerini yapay zeka alacaktır.
Drone teknolojisinin imkanları da kullanılarak yukarıda bahsetmiş olduğumuz tüm teknolojik yeniliklere görsel olarak durumsal farkındalık da ilave edilebilir.
Tüm bu yenilikler halen üzerinde çalışılan ve ilk prototipleri paylaşılan insansız liman römorkörlerini de ilave edebiliriz.,
Kanada orjinli ünlü römorkör dizayn firması Robert Allan Ltd. bu alandaki öncü firmalardan biridir. Ramora 2400 isimli insansız römorkör projesi halat verme işlemi için bile gerçek kişiye ihtiyaç duymaz ve hibrid ,çevre dostu makinelere sahiptir.
Ramora 2400 karada konuşlanmış bir operatör tarafından kullanılır ve 360 derece römorkörün çevresini detaylı gözleyen kameralara ve oldukça uzun bir batarya ömrüne sahiptir. Römorkörün kontrol üniteleri özellikle denizaltı ve ROV teknolojileri konusunda uzmanlaşmış bazı Kanadalı firmalarla işbirliği içerisinde dizayn edilmiştir.
Bu konuda gerekli yerel ve ulusal kurallar hayata geçirildiğinde çok yakın bir gelecekte bu tip römorkörlerin bı ABD ve Avrupa limanlarında devreye girdiklerini göreceğiz.

Şekil-10 Ramona insansız liman römorkörü
Tüm bu yeni teknolojilerin desteği ile muhtemelen çok da uzak olmayan bir gelecekte kılvuzluk himetleri karadan ( land-based ) olarak gerçekleştirilecektir.
Bu hizmetin ne şekilde olabileceğini biraz irdeleyecek olursak ,opersyonun olmazsa olmaz unsurlarını kabaca aşağıdaki gibi sıralayabiliriz.
1. Yukarıdaki sayfalarda anlattığımız Yanaşma Yardımcı Sistemleri içinde yer alan ,rıhtımda uygun aralıklarla konuşlandırılmış lazer sensörler.
2. Mecburi olmamakla beraber gemide bulunan fonksiyonel Dinamik Konumlandırma Sistemi konsolu
3. Karada konuşlu kılavuz kaptan veya yardımcısı tarafından kullanılacak insansız liman römorkörleri.
4. En az bir mil uzaklıktan gemiyi takip edecek ve kuşbakışı gerçek görüntü hizmeti verecek bir ya da iki uzun batarya ömürlü drone.
5. Limanın gerekli noktalarında bulunan akıntı ve rüzgar ölçen sensörler.

Şekil-11 Durumsal farkındalık amaçlı kullanılan manevra drone’ları
6. Gemi ve karada konuşlanmış kılavuz kaptan arasında VHF ve aynı zamanda yedek (back-up) karşılıklı dijital ses yayınıyla desteklenen ve gerektiğinde kullanmak üzere uzun ömürlü bataryalara sahip kayıt yapabilen bir iletişim sistemi.
7. Tüm bu bilgileri işleyerek mevcut durumda belli zaman aralıklarında geminin olası konumunu gösteren , gerektiğinde önleyici manevra öneren ve geniş ekranlarla desteklenen bir manevra bilgisayar konsolu.

Şekil-12 Karadan yapılan manevra operasyon konsolu
Yukarıda sıraladığımız unsurlar karada konuşlanmış bir kılavuz kaptan tarafından kullanılarak hizmet alan geminin yanaşma ,kalkış vs.manevrası gerçekleştirilecektir.
Ancak bu gelişmelerin bir sonraki aşaması da muhtemelen yapay zekanın henüz öngöremediğimiz ancak çok da uzak olmayan bir gelecekte operasyonu yapan kişinin yerini alacağı gerçeğidir.
Çoğumuz geçmişte gemilerin olmazsa olmazı, yabancıların şakayla karışık old sparky diye hitap ettiği telsiz zabitlerimizi hatırlarız.
Mors alfabesini bilen ve kullanan tek kişi olarak geminin karayla olan hayati iletişimini sağlayan , kaptanların adeta göz bebeği çok değerli meslek insanları olmalarına rağmen 1990’lı yılların başlarında devreye giren GMDSS sistemleriyle bu hizmetlerine gerek kalmadı ve iletişim işi bundan sonra kaptan ve zabitler tarafından yerine getirilmeye başlandı.
Kılavuzluk firmalarının özellikle Ar-Ge yatırımlarına belli bir ödenek ayırarak beraber çalışacakları yazılımcı firmaları yeni konseptlerin hayata geçirilmesinde gerektiği şekilde yönlendirerek bu alanda öncü olmaları gerektiğini düşünüyorum. Aksi takdirde bu alanın denizcilik sektörü dışında olan firmalar tarafından domine edilmesi mesleğimizin geleceği konusunda şimdiden farkında olmamız gereken bazı riskleri beraberinde getirmektedir.
Çok dile getirilen tarihi bir olgudur :
Tarihi kaynaklarda Osmanlı İmparatorluğuna matbaanın bu kadar geç gelmesinin biraz da hattatlar yüzünden olduğu anlatılır.
Zira hattatlar matbaa gelirse işimizden oluruz diye bu konuda ciddi bir direniş göstermişler ve kısmen başarılı da olmuşlardır.
Bu tavırları Osmanlı’nın düşük okur yazarlık seviyesinin iyileştirilebilmesine engel olmuş ve bir anlamda cehaleti de beslemiştir. Osmanlı’nın 19.yüzyılda hasta adam olarak anılmasına katkısı olan etkenlerden biridir.
Oysa hattatlar matbaa’nın Osmanlı’ya gelmesinden bu kadar korkmasalar bilakis aralarında organize olup matbaa makinesinin ithalatını ve kullanımını organize eden öncü bir zümre olabilselerdi hem kendileri bu durumdan çok faydalanırlar, muhtemelen ülkemiz de bugün çok daha farklı bir yerde olurdu.
Saygılarımla ,
Kpt. Alpertunga Anıker






























Yorumlar
Kalan Karakter: